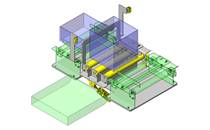
为了准确进行LCA(低成本自动化)机械结构的运动及定位并缩短周期时间,必须加快从起动到停止的一系列运动。同时,要选择移动顺畅、平稳、安静的机构。为此,预先了解各种运动的特征以及实现这些运动的机械结构非常重要。在这里,我们将对与运动的种类相关联的机构予以解释。在实际的LCA中,多个运动件相互连接,构成机构。
运动的种类:由于惯性容易处理,所以驱动侧的运动形态大多为旋转运动。
1.[连续]与[间歇]
2.[直线]与[曲线]
3.[往复]与[旋转]
4.[平面]与[立体]
5.[匀速]与[非匀速]
6.[匀加速]与[非匀加速]
7.[可逆]与[不可逆]
8.[变速]
9.[平行]
10.[比例]
11.[倍力]
12.[复合]
LCA机械结构中经常使用的运动种类以及实现它们的机构示例如下所示。
运动的种类 | 典型机构(解释) | |
驱动侧 | 从动侧 | |
等速旋转运动 | 间歇 | 凸轮、日内瓦齿轮、棘轮等 (在LCA中,间歇运动比连续运动更多) |
变速 (加速、减速) | 齿轮、皮带、摩擦轮等 (多用于使驱动侧与从动侧减速相匹配) | |
平行 | 皮带、链节等 (可以构成能够在保持移动方向的同时进行移动的机构) | |
摆动 | 链节、凸轮等 | |
倍力 | 拨杆、螺丝等 (可以通过杠杆原理的应用机构来增大并传导力量) | |
匀速 | 齿条和小齿轮、凸轮、皮带、齿轮等。 (将匀速旋转运动转换为非匀速往复直线运动的机构常用于输送机的间歇快进等) | |
匀加速度 <非匀加速度> | 凸轮等 (加速度控制的关键点在于减轻质量。在非匀加速度运动控制中,需要采取振动和噪声对策等) | |
")
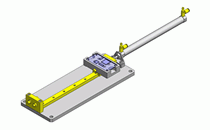
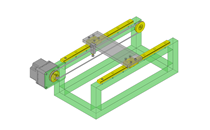
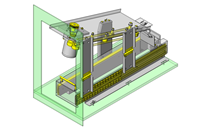
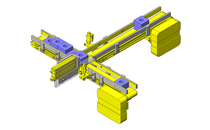
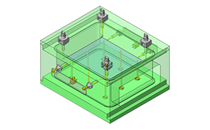
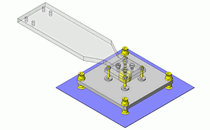
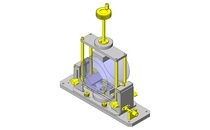
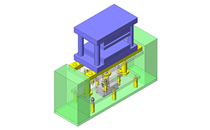
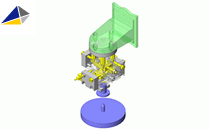
在上图中的LCA机构中,驱动侧马达的旋转运动通过联轴器转换为凸轮的旋转运动,再通过连杆和杆端元件(机械构件)转换为复杂的摆动运动。